
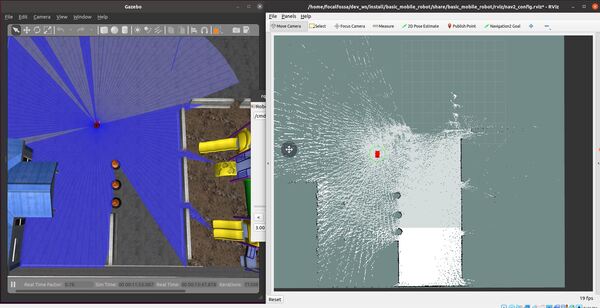
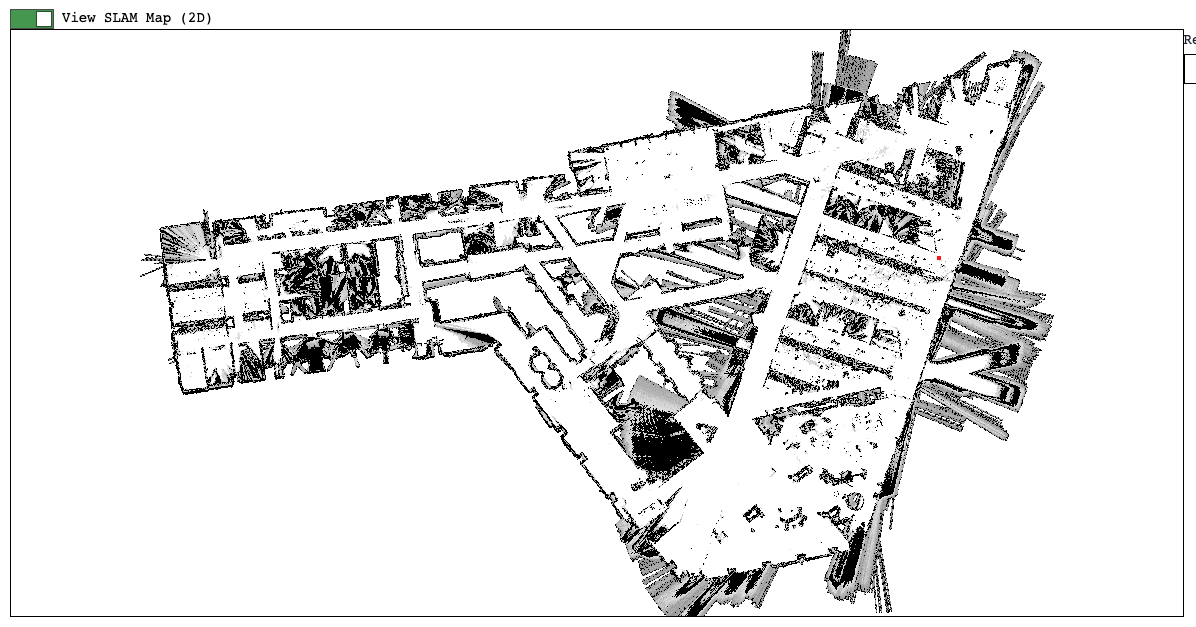
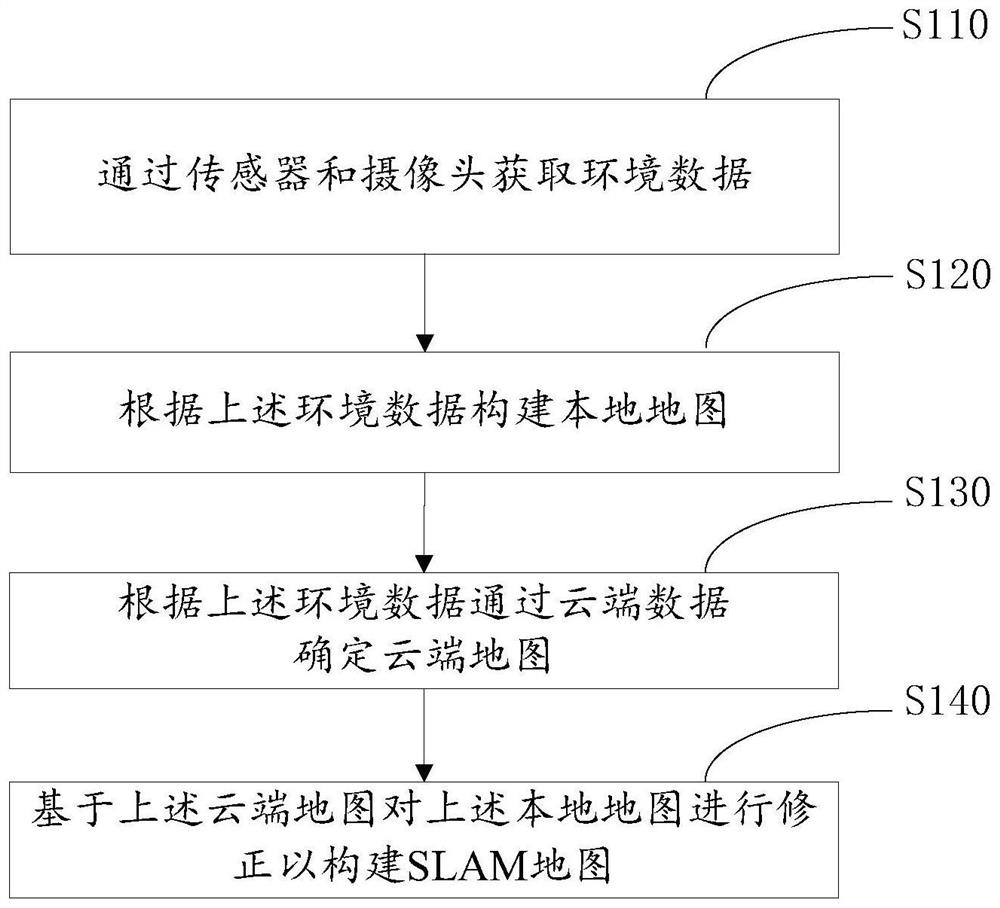
Last update images today Navigation And SLAM Using The ROS 15 Slam Map Building Slam Map








































SLAM Map Building OriginBot - Image 20220822151138811 Rob tica M vil CC5316 Clase 16 - EKF SLAM Map Correlation Matrix Fusing both 3D octree map and 2D - Fusing Both 3D Octree Map And 2D SLAM Map SLAM MAP Change Maps Space Intelligence - 5 1024x724 SLAM Map Builder Build 2 D grid - BuildAndTuneAMapUsingLidarScansWithSLAMExample 05 Slam Mobile Mapping The Future - Football Club 06 1536x1025 How can I get the same map size - 83329798 Bcce1e00 A28b 11ea 8da8 32da4d515ff6 Rob tica M vil CC5316 Clase 16 - EKF SLAM Map Correlation Matrix
Slam Maps vrogue co - Edited Map Large GitHub khazit CrazySLAM SLAM - Slam Maps SLAM Map Builder - Slammapbuilder App Fusion method of indoor SLAM map - HDA0002002423500000011 Topological Mapping and Navigation - Ee9e17026954698ac646965528b08bba3773d016 Sensors Free Full Text Feature Based - Sensors 23 03114 G001 DENSE RGB SLAM WITH NEURAL IMPLICIT - 1 Maps registered with the same dataset - Maps Registered With The Same Dataset And With Different SLAM Approaches In Environment.ppm
SLAM Hi tree - Slam Map Result Graph SLAM maps MRPT - Graph Slam View With Edges Mismatches 1024x553 Custom Gazebo environment for getting - Custom Gazebo Environment For Getting A Slam Map For Testing The Proposed Algorithm Fig Q640 SLAM Map Builder Build 2 D grid - BuildAndTuneAMapUsingLidarScansWithSLAMExample 06 Result of SLAM map of the environment - Result Of SLAM Map Of The Environment With Q320 2016 Graph Based SLAM using Building - Maxresdefault C ng ngh SLAM tr n AGV AMR - Slam Map PDF SLAM and map merging - Map Obtained Scan Matching SLAM Q640
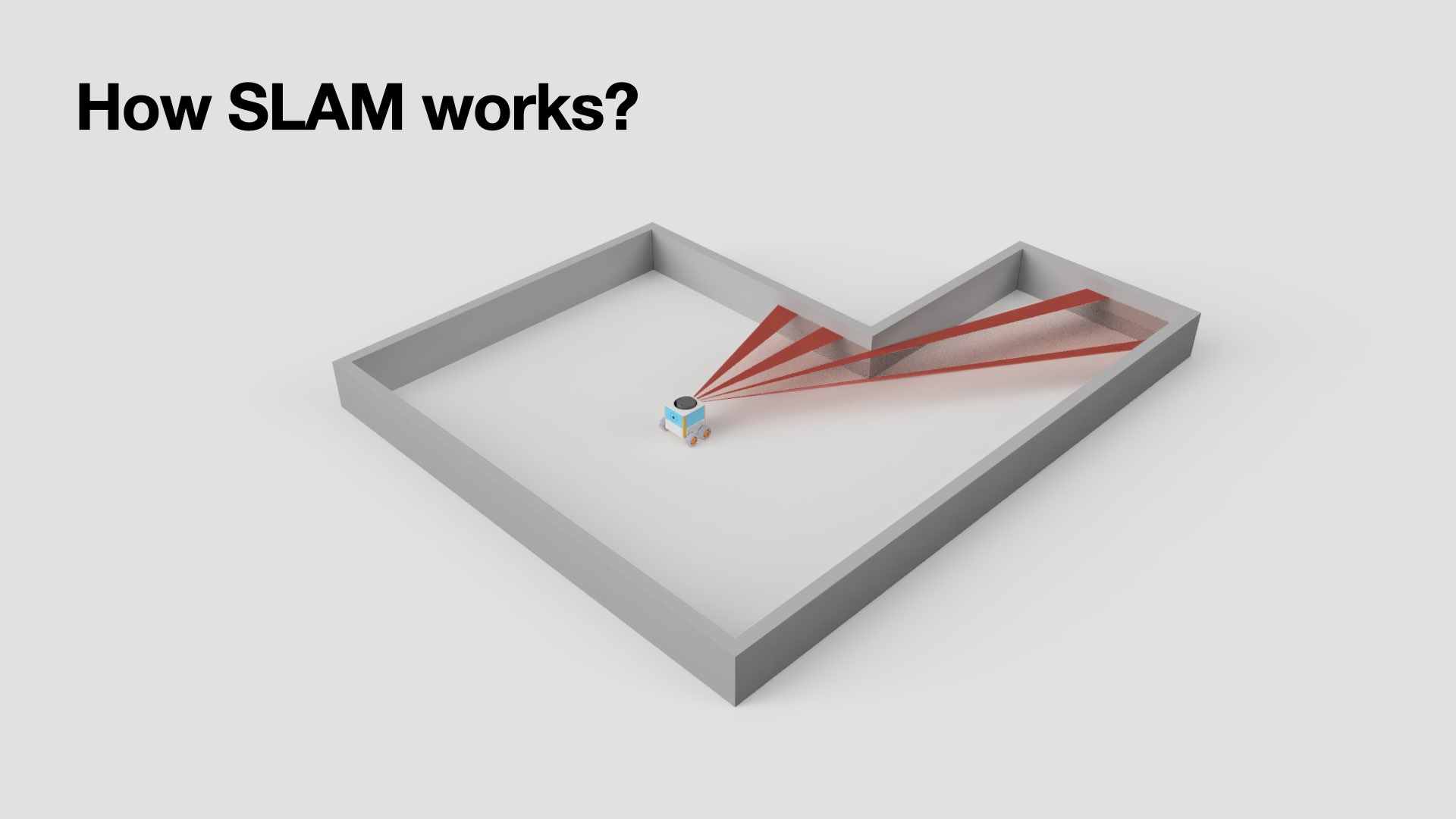
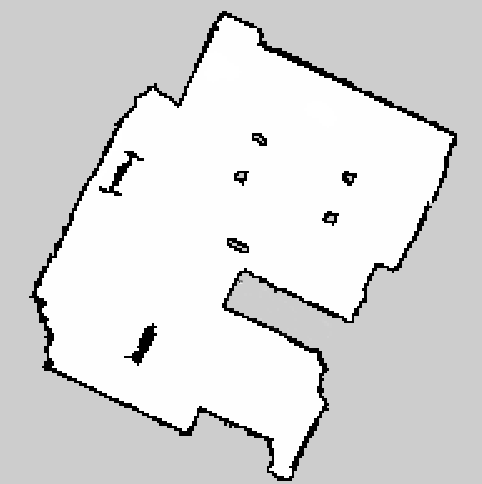
Partial SLAM map for floor 4 - Partial SLAM Map For Floor 4.ppmhttps docs viam com operate reference services slam - View Map Page Navigation and SLAM Using the ROS - 15 Slam Map Building Simultaneously Localisation and - What Is Simultaneous Localization And Mapping SLAM A Robot Observes The Environment slam map robotic occupancy grid - E2fd5f21 421d 47ca B9c4 11ed2314eba9 The VIAL SLAM map aligned with - The VIAL SLAM Map Aligned With Google Earth Topomap Topological Mapping and - Maxresdefault Rob tica M vil CC5316 Clase 16 - EKF SLAM Map Correlation Matrix
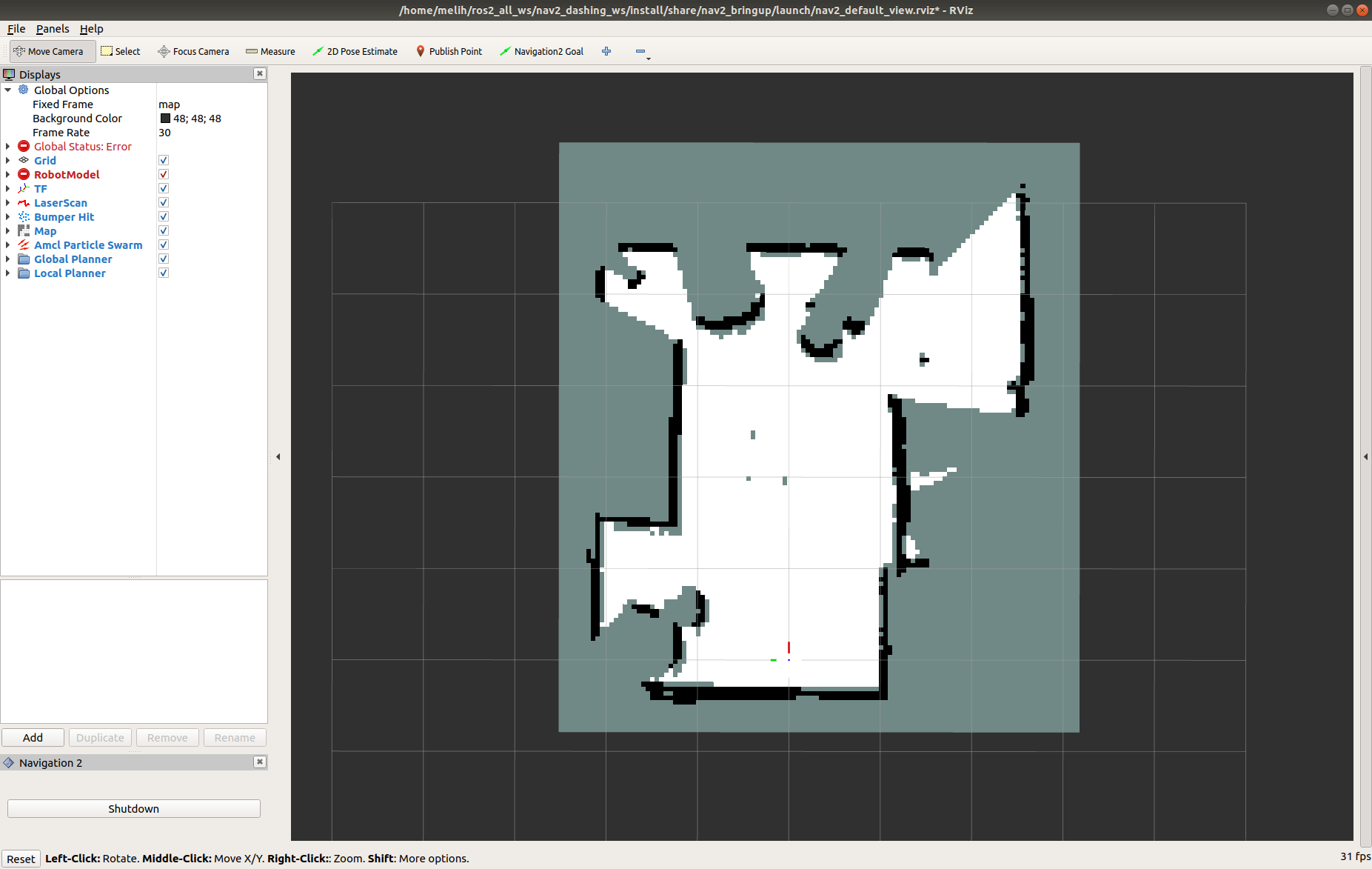
Conforming SLAM Maps to Survey - Mine 02 1024x565 A slam map of the roamable areas - A Slam Map Of The Roamable Areas In The Indoor Environment Locations Of Different Q640 a SLAM map localization by Ventura - A SLAM Map Localization By Ventura Et Al 71 B LSD SLAM Reconstruction By Engel Q640 Establishing correspondences between - Establishing Correspondences Between A Floor Plan And The SLAM Map Colored Squares The.ppmA SLAM Map B Defect location Map - ASLAM Map B Defect Location Map And C SLAM Defect Map Nav2 Turtlebot3 ros iron nav2 bringup CSDN - Rviz Slam Map View Comparing different SLAM methods - Akros Slam Maps PDF Topomap Topological Mapping - The Two Basic Elements Of The Topological Map A The Topological Graph Contains The Q640
SLAM based on RPLIDAR and ROS Hector - Maxresdefault Figure 5 from Generic 2D 3D SLAM - 6 Figure3 1 Mapping and Localization - SimulateRGBDVisualSLAMWithCoSimulationGazeboAndSimulinkExample 05 SLAM Map Building OriginBot - Image 20220928220241108 Kitware Lidar SLAM is available - Ros Slam 2 2 1024x1024 UrbanFly Uncertainty Aware Planning - Maxresdefault A SLAM Map B Defect location Map - System Architecture Q640 PDF Sketched Floor plans versus - Establishing Correspondences Between A Floor Plan And The SLAM Map Colored Squares The Q640
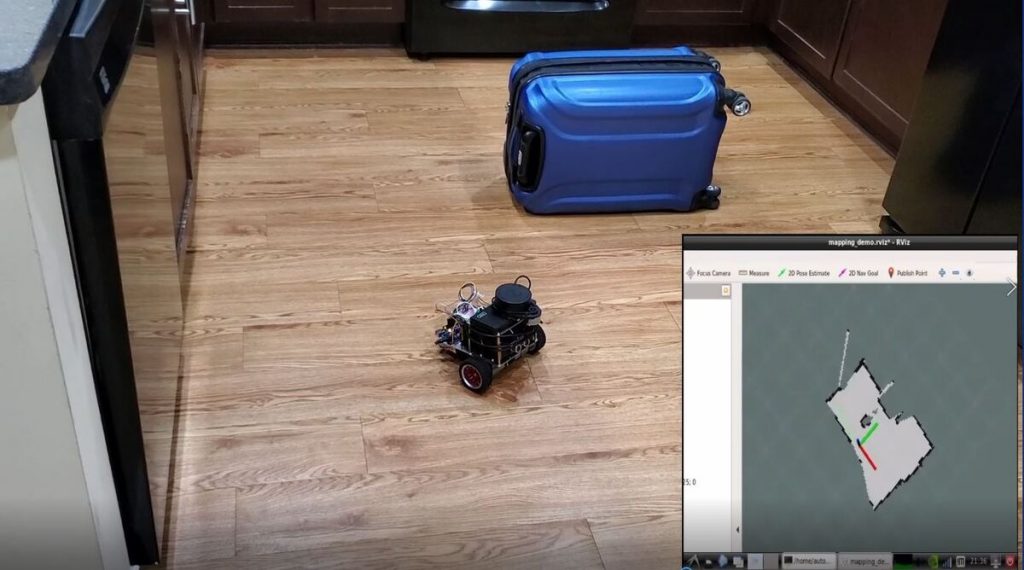
SLAM map for the collection of - SLAM Map For The Collection Of Rooms Case With Arrows Marking Possible Frontier Points Extracted SLAM maps 4a 4b 4c - Extracted SLAM Maps 4a 4b 4c 4d.ppmBuilding the SLAM map including - Building The SLAM Map Including Left The Map Before Path Merging And Right After Path MD SLAM map on long sequence from - MD SLAM Map On Long Sequence From Newer College Dataset 21 Aligned With Google Earth Q320 Snapshots of the CORB2I SLAM map - Snapshots Of The CORB2I SLAM Map Fusion Experiment On EuRoC Sequences 49 A Map Q320 SLAM - Slam01 How to Build an Indoor Map Using - Slam Map Building 1024x570 Slam Mobile Mapping The Future - SLAM MOILE MAPPING
Graph SLAM maps MRPT - Graph2d Point Edges GitHub envire slam maps Envire - Envire Maps Standard SLAM map construction method and - HDA0003306760040000011 SLAM map of the 3D point cloud - SLAM Map Of The 3D Point Cloud Red Cube And The Trajectory Of The Marker Green Sphere.ppm